ADI:基于IMU和地磁传感器的捷联惯性导航系统
本文旨在介绍我们使用ADI公司的惯性测量单元(IMU)传感器ADIS16470和PNI的地磁传感器RM3100构建的捷联惯性导航系统(SINS)。实现了基于磁力、角速率和重力(MARG)的SINS的一些基本过程,包括电磁罗盘(地磁传感器)校准、使用扩展卡尔曼滤波器(EKF)的姿态和航向参考系统…
2020-04-26 15:41:37

本文旨在介绍我们使用ADI公司的惯性测量单元(IMU)传感器ADIS16470和PNI的地磁传感器RM3100构建的捷联惯性导航系统(SINS)。实现了基于磁力、角速率和重力(MARG)的SINS的一些基本过程,包括电磁罗盘(地磁传感器)校准、使用扩展卡尔曼滤波器(EKF)的姿态和航向参考系统…
2020-04-26 15:41:37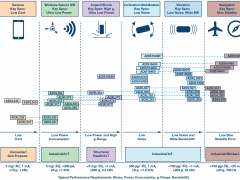
本文第一部分讨论设计人员需要知道的关键参数和特性,以及它们与倾斜和稳定应用的关系,从而帮助设计人员选择最合适的加速度计。第二部分将重点关注可穿戴设备、状态监控(CBM)和物联网应用。
2020-04-26 15:39:32
为应用选择最合适的加速度计可能并不容易,因为来自不同制造商的数据手册可能大相径庭,让人难以确定最为重要的技术指标是什么。在本文第二部分,我们将从可穿戴设备、状态监控和物联网应用的角度重点讨论各项关键技术指标和特性。
2020-04-26 15:38:55周一至周五
09:00 - 17:30
 客服微信
客服微信
 查ic网订阅号
查ic网订阅号


