

交流电 (AC) 不断反转方向,交替流向一个方向,然后流向另一个方向。交流电压也可以类似地描述。通常,交流电压和电流是正弦曲线,峰值、平均值和有效值之间存在确定的关系。
考虑在磁场中旋转的两个串联导体,如图 1 所示。导体 1 和 2 在两个磁极之间设置的磁场内形成一个回路。导体以机械方式固定在配有手动转动曲柄的轴上。每个导体都连接到滑环,并且滑环具有用于电连接到外部端子(A和B)的电刷。当环路旋转时,导体切割(或刷过)磁通量,导致每个导体中产生电动势。

图 1. 由在磁场中旋转的导电环组成的简单交流电压发生器。当导体扫过磁极时,每个导体中都会感应出电动势(并在输出端子处产生)。当导体从一极移动到另一极时,电动势会反转极性。
图 2 说明了环路在磁场中旋转时各个实例的情况。这些可以解释如下。
循环是水平的
图 2(a): 环路是水平的,导体一向上移动,导体二向下移动。由于此时每个导体的运动与磁场方向平行,因此没有磁通被导体切割,因此不会产生电动势。如电压 (e) 与时间 (t) 关系图上的点“a”所示,输出端子(图 1 中的 A 和 B)处的电压为零。
导体以一定角度移动
图 2(b): 导体现在以一定角度穿过磁场移动,因此每个导体都会切割一些磁通,并且每个导体中都会感应出 EMF。根据楞次定律,感应电动势的方向必须与引起电动势的运动相反。因此,导体一中感应的电动势会导致电流流向观察者,如图所示。该电流在导体周围产生逆时针方向的磁通量,该磁通量增强了导体前面的磁场并减弱了后面的磁场(即,它与导体的运动相反)。
类似地,导体 2 中的感应电动势会产生如图所示方向的电流,远离观察者。在导体 2 周围建立了顺时针磁通,这再次削弱了导体 2 后面的磁通并增强了导体前面的磁通,与导体的运动相反。可以看出,两个导体中的电流方向是相互协助的[即,电流以单一方向围绕环路(图1)流动]。
因此,输出电压在端子 A 处为正,在端子 B 处为负。(导体 1 连接到 A,导体 2 连接到 B。)电流按所示方向(从 A 到 B)流过外部负载RL 。当绘制端电压 e 的增长与时间 t 的关系时,结果如图 2(i) 中的图形(或波形)所示。点“a”表示在图2(a)中的条件下获得的零输出电压,点“b”是当导体位置如图2(b)所示时稍后的输出电压。
导体垂直于磁场移动
图 2(c): 导体现在垂直于磁场移动。因此,它们切割磁通并产生电动势。同样,电流方向相互辅助,使得电流围绕环路流动,并且端子 A 保持正值,而端子 B 为负值。现在,通过 R L 的输出电流 比以前更大,并且如 e-vs-t 图表所示,输出电压已达到峰值,即“c”点。
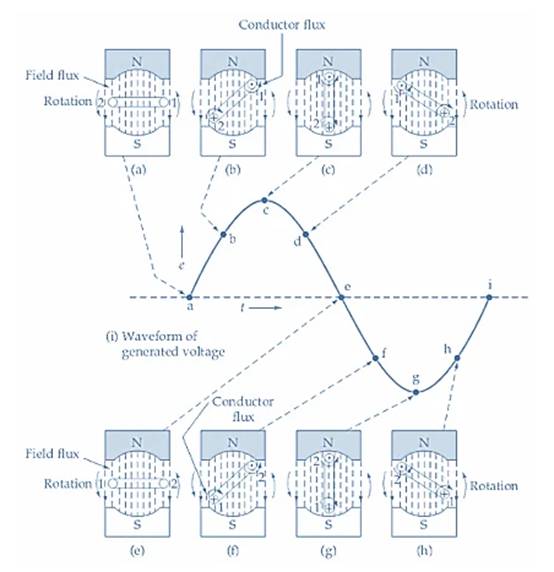
图 2. 在磁场中旋转的导电环路的端子处生成正弦电压波形。当导体垂直于磁场移动时,会产生峰值输出电压[参见 (c) 和 (g)]。当导体平行于磁场移动时,会产生零输出[参见 (a) 和 (e)]。图片由 Amna Ahmad 提供
导体移动角度小于 90 o
图 2(d): 现在,导体再次以与磁场方向小于 90° 的角度移动。因此,被切割的磁通量减少,因此生成的 EMF 小于图 2(c) 中的条件。电流方向和输出电压极性与之前相同。然而,输出电压现在已降至峰值水平以下,如 e-vs-t 图表上的“d”点所示。
导体平行于磁场方向移动
图2(e): 此时,导体再次平行于磁场方向移动。没有通量被切割,因此不会产生 EMF。输出电压为零,绘制在电压随时间图上的点“e”处。
导体以一定角度移动
图 2(f): 导体再次以与磁场方向相关的角度移动。然而,现在两个导体的感应电流方向相反。导体一中的电流方向远离观察者,而导体二中的电流方向朝向观察者。可以看出,电流仍然互相辅助,使得环路周围的电流仍然具有单一(但相反)方向。现在的输出电压使得端子 B(图 1 中)为正,而端子 A 为负。随时间绘制的瞬时输出电压给出了图表上的“f”点。
导体垂直于磁场移动
图 2(g): 导体的运动再次垂直于磁场,并且通量被切断。因此,再次产生电动势。输出电压仍然是负值,并且已达到其峰值,绘制在 e-vs-t 图表上的点“g”处。很容易看出,随着环路继续旋转,输出电压再次变为零,然后再次反转,如此周而复始。
由于旋转回路产生的电压是正负交替的,所以称为交流电压。由交流电压供电的负载中产生的电流首先沿一个方向流动,然后沿另一个方向流动。所以,它是交流电。 AC 名称通常适用于电流和电压。图 2(i) 中的电压/时间图称为交流波形。

 客服微信
客服微信 查ic网订阅号
查ic网订阅号

