

Quanergy是一家专门利用激光雷达进行3D探测的光电公司,为防止空间过于拥挤,该公司开发了一种可以监控空间内人员流动的系统,该系统甚至可以跟踪体温较高的人。
公司的Qortex流管理平台荣获2020年大流行科技创新奖。随着Covid-19全球流行,Quanergy调整其平台,提供可靠的社交距离解决方案,这仍然是控制病毒传播的最有效策略。

激光雷达是一种飞行时间(ToF)传感技术,它以低功率发射激光,测量传感器和目标之间完成一次往返所需的时间。
Quanergy首席营销Enzo Signore表示:“通过测量发射光到接收光之间的时间,你可以实时测量物体的距离。”当激光雷达传感器在垂直和水平方向发射光时,收集的数据用于生成三维图像,提供空间位置和深度信息,以识别、分类和跟踪移动的物体。
Quanergy的战略最初专注于为自动驾驶汽车提供基于Lidar的解决方案。通过与许多客户的合作,我们看到激光雷达技术正在被其他市场以更快的速度吸收。特别是基于3D无人机的地图业务、智慧城市、智慧空间、安全以及工业市场。因此,在过去的几年里,我们扩大了我们的产品战略,为其他市场开发产品和解决方案。现在,我们看到了这一战略的好处,加速了市场的接受程度。Quanergy目前处于非常有利的地位,不仅提供硬件传感器,而且还提供软件平台,使市场能够迅速采用许多复杂的应用程序。”
在安全方面,激光雷达技术大大降低了假警报,每个覆盖区域的成本降低了5倍多,而且比基于摄像头的系统的精确度显著提高。增强的操作情报允许你管理社交距离的空间占用和流量调节。
据公开信息,Quanergy 的竞争力和创新性来自三方面:
激光相控阵(OptICal Phased Array)
光学集成电路(Photonic IC)
远场辐射(Far Field Radiation Pattern)。
其中激光相控阵是实现「固态」的重要技术。但「固态」激光雷达在当时也引起一些讨论:因为 Quanergy S3 采用的是相控阵方式(Optical Phased Array)。
火爆的Lidar
激光雷达的原理是基本固定的,但建立一个激光雷达系统不一定简单。工程师计算距离的公式是:物体距离=(光速x飞行时间)/ 2。激光雷达测量飞行时间,用来计算飞行距离。经过的距离然后转换为高度。这些测量是通过使用飞机激光雷达系统的关键组件,包括识别光能的X、Y、Z位置的GPS和提供飞机在天空中的方向的内部测量单元(IMU)。
其中一个复杂的因素是发射的光可以在不同的方向上反射。观察一棵树,一些光子有可能会被树枝反射,但其他光子会继续穿过地面并从地面反射,甚至有可能一个光脉冲会产生多次反射。
本质上,它与雷达技术非常相似。两者都使用了速度、角度和范围等参数。当然,雷达使用的是无线电波而不是光。激光雷达可以提供三维图像,从而完整地创建周围的世界。
不像相机,激光雷达不提供任何隐私风险。Signore:“这里不涉及面部识别,所以没有隐私信息的侵犯。”
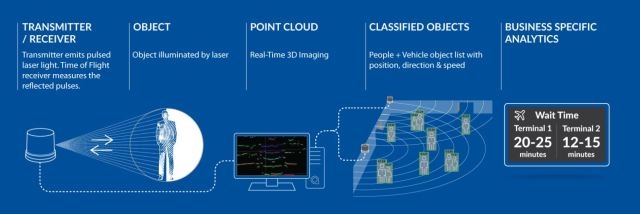
激光雷达系统的硬件本质上由发射器、接收器和点云组成,点云识别来自扫描环境的一组数据,以及建筑物、树木和其他永久性结构等固定物体。一种数据集,可以通过软件系统转换来创建给定区域的基于lidar的3D图像。
识别参数是定义为传感器所覆盖角度的视场。通常,激光雷达传感器的性能是在水平和垂直视场测量。
在激光雷达中要考虑的另一个因素是目标的反射率。激光雷达技术反射光线很重要,一些目标比其他目标反射得更好,更容易被探测到。白色表面比黑色表面反射更多的光。因此,后者非常难以检测。镜子以特定的方向反射,该方向可能不是传感器的方向。不像其他物体那样将入射光分散到不同的方向。
目标如交通标志和车牌反射高百分比的光到接收器,是激光雷达传感器的良好目标。由于这些差异,激光雷达传感器的实际性能和最大有效范围可能会因目标的表面反射率而有所不同(图1)。
Signore:“我们给市场带来了许多独特的价值主张。第一个是关于点云的准确性和丰富性,一切都是关于数据的。因此,Quanergy比其他解决方案更好的一个关键特征就是我们可以生成非常丰富的3D点云。例如,用我们的产品,我们可以每秒收集130万次脉冲。这为我们周围的世界创造了非常丰富的3D图像。”
“第二个关键区别在于感知软件。拥有一个点云很重要。但更重要的是如何解释传感器正在观察的东西并使之有意义。因此,使用我们称为Qortex的感知软件,我们现在可以解释传感器周围的物体。例如,我们可以看到人,车辆,背景,然后我们可以计算有多少人在视野中,不仅XYZ位置,还能识别速度和方向。传感器可以确定你我之间的距离并告诉我们。所以我们也可以将这些信息用于社交距离应用。我们可以提供95%到98%的精度,这取决于应用的类型,与光照条件无关,它可以在完美的,漆黑的夜晚,也可以在一个阳光灿烂的白天。
另一个根本区别在于解决方案的总体成本。例如,在我们的例子中,使用m系列,我们可以在最远70米的距离内以95%以上的精度看到和分类物体。因此,一个传感器可以覆盖15000平方米。你将需要超过100个摄像头来覆盖相同的区域。”
Quanergy提供M和S系列的硬件传感器。m系列激光雷达传感器用于地图、安全、智慧城市和智慧空间应用。s系列是一个真正的100%固态激光雷达基于光学相控阵(OPA)技术,提供抗振动和超过100,000小时的平均故障间隔时间(MTBF)。此外,经济和可伸缩的CMOS硅工艺可以实现极具成本效益的大规模生产。
Qortex平台
Quanergy公司的Qortex流量管理平台配备了激光雷达传感器和人工智能技术,为计数、对象检测、分类、跟踪、监控、社交距离等提供实时分析。
该平台集成了热感摄像机来识别和跟踪体温较高的人。保障私隐,毋须登记,亦不会有披露可辨识个人身分资料的风险。该解决方案可用于监视公司、零售店、机场、工厂、配送中心和公共交通中的社交距离。
每个应用领域都有其自身的复杂性和技术挑战。您需要确保有足够的传感器覆盖整个视场,同时还要绕过阻碍视场的遮挡,例如柱或其他复杂的环境、架构元素(图2)。

正在申请专利的Qortex人计数器平台是基于Qortex感知软件和S3-2固态激光雷达传感器组成。这个集成的软/硬件解决方案结合了机器学习和3D感知算法来扫描传感器的视野,分析激光雷达S3-2点云,并提供实时检测到的匿名数据。S3-2系列激光雷达传感器使用传感器融合技术,可实现精确计数。
Qortex DTC(检测、跟踪、分类)是Quanergy平台的大脑,能够实时监控,生成大量数据,包括位置、方向、速度和被检测物体的类型。通过它的API,终端用户、系统集成商和应用程序开发人员可以构建一个强大的分析和商业智能工具来监视和自动化流程。
激光雷达技术可以成为一种加强监督社交距离的方法。当人与人之间的距离小于建议距离,或者某一区域的人数超过一定限度时,就会发出警告,并派工作人员前往。该解决方案还可以与热感摄像机集成,在保证阴死的情况下确定体温。这一解决方案也可用于体育场馆,向公众重新开放体育赛事可能对改善人们在这种紧张时期的情绪有积极作用。
延伸阅读——光学相控阵OPA是啥?
讲一下什么叫做相控阵?
相控阵即相位补偿(或延时补偿)基阵,它既可用以接收,也可用以发射。其工作原理是对按一定规律排列的基阵阵元的信号均加以适当的移相(或延时)以获得阵波束的偏转,在不同方位上同时进行相位(或延时)补偿,即可获得多波束。其优点是,不必用机械转动基阵就可在所要观察的空间范围内实现波束的电扫描,非常方便灵活。同时,基阵的尺寸便可做得大一些以提高空间增益。
光学相控阵(OPA)的概念来源于传统的微波相控阵,但比微波相控阵有着明显的优势,由于光学相控阵是以工作在光波段的激光作为信息载体,因而不受传统无线电波的干扰,而且激光的波束窄,不易被侦察,具备良好的保密性。另外,相比于大体积的电学相控阵,光学相控阵可以集成在一块芯片上,尺寸小、质量轻、灵活性好、功耗低。这些优势使得光学相控阵在自由空间光通信、光检测和测距(LIDAR)、图像投影、激光雷达和光学存储等领域有着极大的吸引力。
光学相控阵基本原理
光学相控阵的基本原理和微波相控阵类似,一束光经过光分束器分为多路光信号,在各路光信号不存在相位差的情况下,光到达等相位面处的时间相同,光向前传播,不会发生干涉,因而不会发生波束偏转。在各路光信号附加相位差之后(以各路光信号赋予均匀的相位差为例,第二个波导与第一个波导的相位差为ΔϕB,第三个波导与第一个波导的相位差为2ΔϕB,以此类推),此时的等相位面不再垂直于波导方向,而是有了一定的偏转,满足等相位关系的波束会相干相长,不满足等相位条件的光束就会相互抵消,故光束的指向总是垂直于等相位面。如图1所示,设相邻波导之间的间距都为d,则相邻波导输出的光束到达等相位面的光程差为ΔR=d·sinθ,其中θ表示光束偏转角度,由于这个光程差是由阵元的相位差引起的,因而ΔR=ΔϕB·λ/2π,所以在阵元中引入相位差完成了波束的偏转效果,这就是一维相控阵的扫描原理。

基于上述优势,激光雷达在光学相控阵上可以说是一个巨大的发挥舞台。传统的机械扫描激光雷达系统复杂、扫描速度慢、质量大、体积大,不利于集成,无法大规模生产,尤其是目前随着人工智能的发展,无人驾驶汽车和辅助驾驶成了很热门的研究方向,无人驾驶汽车极为重要的一环就是激光雷达,它就好比是汽车的眼睛,为无人驾驶汽车指引方向;传统的机械扫描雷达的扫描视场太小,很显然无法满足无人驾驶汽车的要求,同时机械式扫描的激光雷达扫描速度慢,实时性差,无法实时地把控路况,这就需要光学相控阵激光雷达。鉴于上述问题,一种解决方式就是在器件中完全取消机械结构,采用光通信中较为成熟的平面光波导技术来制作光学相控阵扫描器件。



 客服微信
客服微信 查ic网订阅号
查ic网订阅号

