

近年来激光雷达借助智能汽车和自动驾驶的东风成为工业界的研究热点,而前不久小鹏汽车透露将推出全球首款搭载激光雷达的智能汽车,吸引了全球的广泛关注。与此同时,各大设备生产商也嗅到了商机,比如华为频繁释放关于量产车规级激光雷达的消息,并将为大量汽车企业提供激光雷达产品。
激光雷达作为一种三维视觉输入设备,具有大视场、高扫描线数的特点,是未来自动机器定位、无人车技术不可缺少的路况感知设备。目前常见的激光雷达扫描线数为16线,采用了16组激光器和探测器进行一对一传输。随着采集数据规模的增加,需要增加激光器和探测器的数量以提高测量精度,将消耗大量的元器件,如激光器、探测器及驱动电路等,增加了激光雷达的体积和成本。
为此,华为公司于2019年4月12日申请了一项名为“光扫描组件及激光雷达”的发明专利(申请号:201910297999.3),申请人为华为技术有限公司。
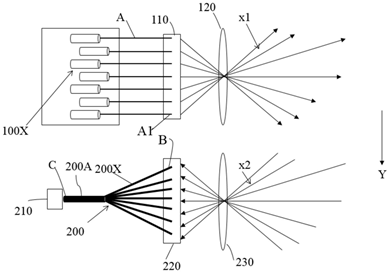
图1 光扫描组件示意图
图1为本专利提出的一种光扫描件示意图,光扫描组件主要用于激光雷达的扫描测量,包括n个间隔设置的激光器100X、一个探测器210、发射光学透镜120、接收光学透镜230以及光耦合部200。发射光学透镜120与接收光学透镜230在第一方向上间隔排列,且光轴彼此平行, n个激光器的发射端A1位于发射光学透镜的焦平面上并间隔排列。激光器100X的发射光纤在不同时刻发射激光束,并通过发射光学透镜将激光束准直,接收光学透镜230将多个激光束产生的回波光束接收聚焦至焦平面,并被光耦合部200送往接收端B。
光耦合部200针对n个激光器设有n个接收通道,分别传递n个回波光束,其中不同角度的发射光束所产生的回波光束均能传导至同一探测器上,从而可实现多路发射、一路接收的扫描测量模式,大幅度减小了探测器组件的使用数量与雷达的体积和成本,同时也简化了控制电路并增强了光扫描组件的稳定性,避免多组回波光束之间的信号串扰。

图2 具有光扫描组件的激光雷达示意图
包含光扫描组件的激光雷达示意图如图2所示,包括扫描转镜500和图1的光扫描组件,扫描转镜沿第一方向延伸的线为转轴进行转动,包括第一反射面S1和第二反射面S2,二者朝向不同,光扫描组件的探测器210和7个激光器100X以及电机均与激光雷达的控制装置电连接,以控制探测器210和7个激光器100X以及电机之间的工作配合。当扫描转镜进行转动时,7个激光器100X发射的7条激光束经两个反射面形成不同的扫描角度进行扫描,从而使得在不增加激光器和探测器的前提下,有效扩展扫描光束的扫描区域,实现大面积测量。
简而言之,华为的光扫描组件专利,间隔设置有多个激光器,结合探测器、发射和接收光学透镜、光耦合部,简化控制电路的同时还增强了光扫描组件的稳定性,可应用于激光雷达、网联车领域,在保证扫描精度的情况下,可解决元器件数量多、体积大和制作成本高等问题。
随着自动驾驶和智能汽车的发展,激光雷达作为三维“眼睛”这一角色必将发挥重要作用,华为公司借助其在半导体、硬件、算法等领域的诸多优势,迟早将踏入车企市场,厚积薄发。



 客服微信
客服微信 查ic网订阅号
查ic网订阅号

